3DS max建模教程:机器人
效果图。
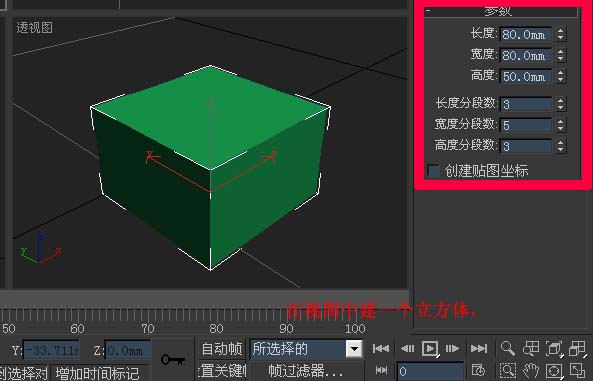
第一步:在视图中建立一个立方体。
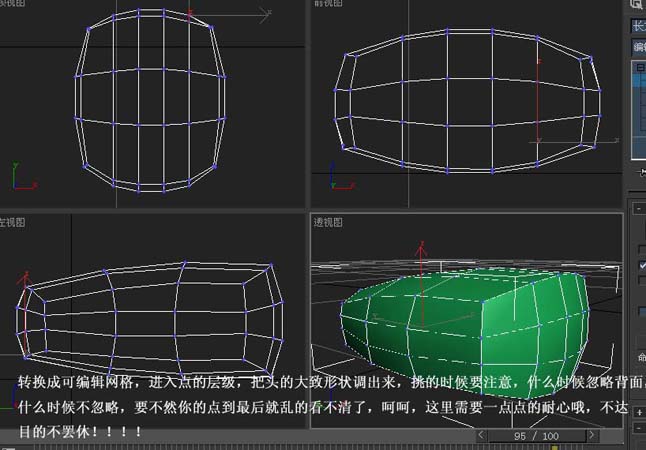
第二步:转换成可编辑的网格,进入点的层级,把头的大致形状调出来,调的时侯要注意。
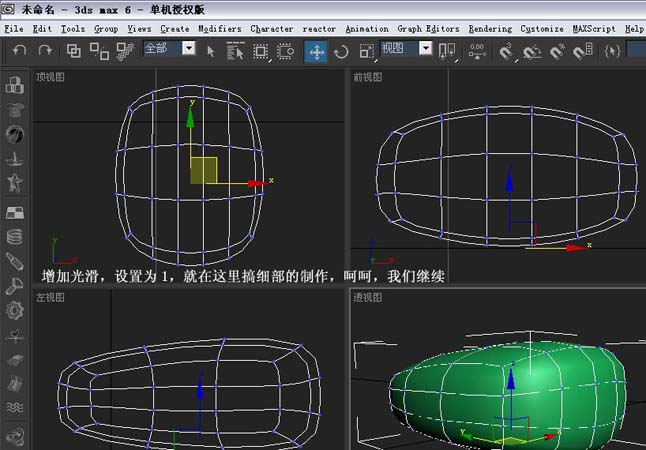
第三步:增加光滑,设置为1,就在这里做细部的制作。
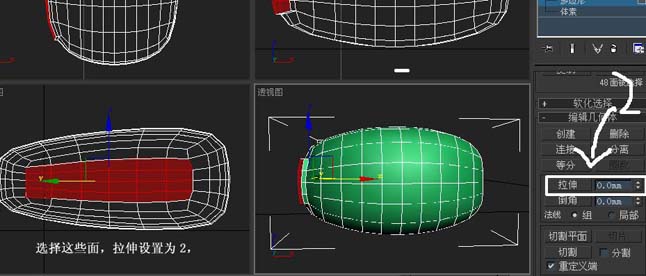
第四步:选择这些面,拉伸设置为2。并在光滑之上,给模型在给一个可编辑网格。
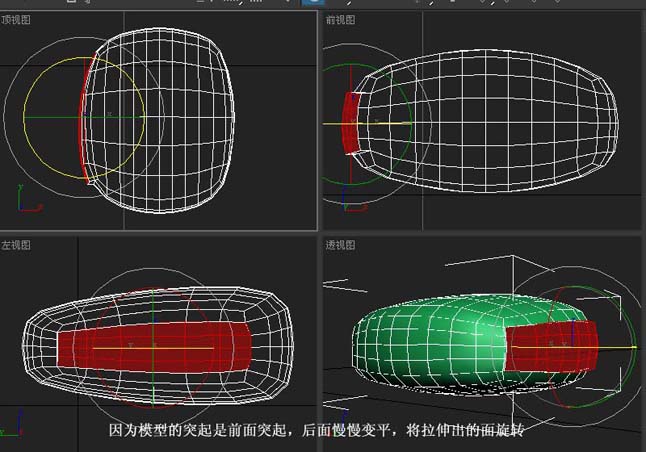
第五步:因为模型的突起是前面突起,后面慢慢变平,将拉伸的面进行旋转。
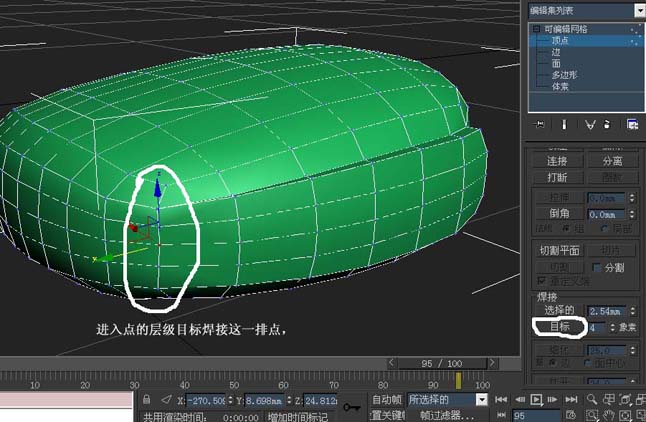
第六步:进入点的层级,进行焊接图中所圈的一排点。
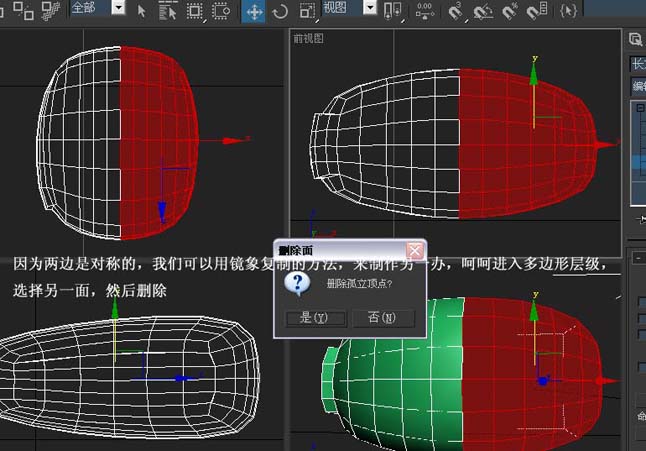
第七步:因为两边是对称的,我们可以用镜象复制的方法,来制作另一半,进入多边形层级,选择另一面,然后进行删除。

3335人学习过



相关教程






